状态栏下部的捕捉工具,可帮助我们在建模和设计过程中精确地定位到需要的位置。通过鼠标点击按钮可以切换状态,状态按钮为蓝色底色填充时,表示开启,无填充时表示关闭。如图1-3-14 捕捉工具,按钮从左到右分别为对象捕捉、对象捕捉追踪、极轴追踪、正交模式、栅格捕捉、锁定平面和捕捉设置。点击各按钮旁边的三角按钮,可以打开捕捉设置对话框,对捕捉工具进行详细设置,如图 1-3-15 捕捉设置对话框。

图1-3-14 捕捉工具
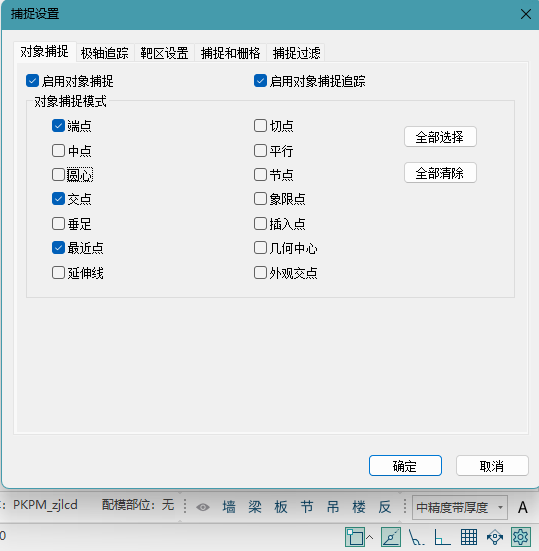
图 1-3-15 捕捉设置对话框
1.3.3.1动态UCS
进入捕捉状态时,鼠标光标处会出现动态UCS,可以直接输入数值来定位构件移动的距离值,也可以按Tab切换到角度、高度、X坐标、Y坐标、Z坐标位置,输入我们想定位的数据,输入框后Enter键确定定位如图1-3-16。
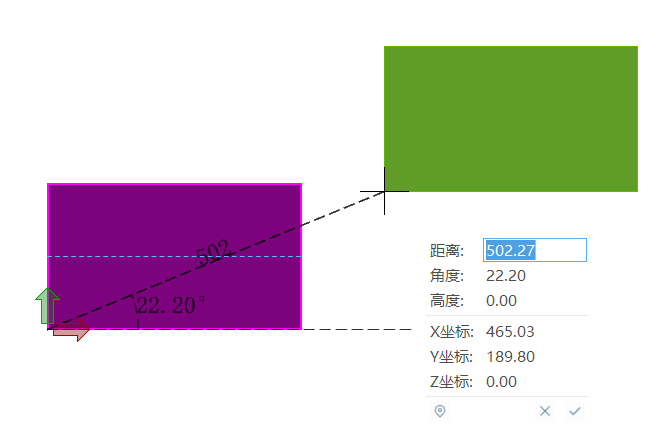
图1-3-16 动态UCS
1.3.3.2对象捕捉
软件提供了13种对象捕捉点,包含了BIM三维建模和二维绘图中常用的捕捉点。可以通过快捷命令F3开启/关闭捕捉设置,同时也可以通过点击状态栏前五个常用捕捉点直接开启,也可以点击对象捕捉按钮旁边的三角按钮,在快捷列表中点击对应的捕捉点开启,如图 1-3-17 对象捕捉,还可直接打开对象捕捉设置对话框,通过复选框勾选对应的捕捉点,如图1-3-15。状态栏的对象捕捉按钮,与对象捕捉设置页面的选项状态是一一联动的。当我们启用了对象捕捉后,鼠标的靶框移动到被捕捉点处时,就能显示勾选的捕捉点类型对应形状的绿色捕捉标记,鼠标光标可自动吸附到捕捉点上,从而选中该点,如图1-3-18。
值得注意的是:软件中当某功能需要指定某点时,会自动开启对象捕捉,退出该功能时,会自动关闭对象捕捉,以帮助用户更方便地使用软件功能。
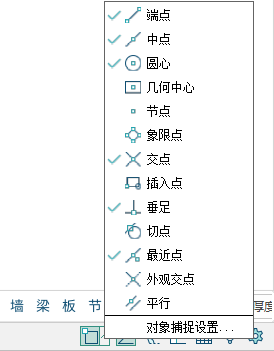
图 1-3-17 对象捕捉
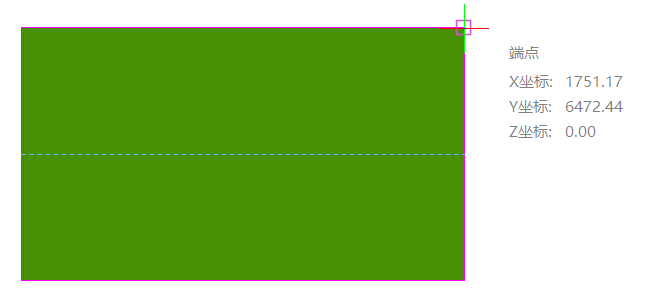
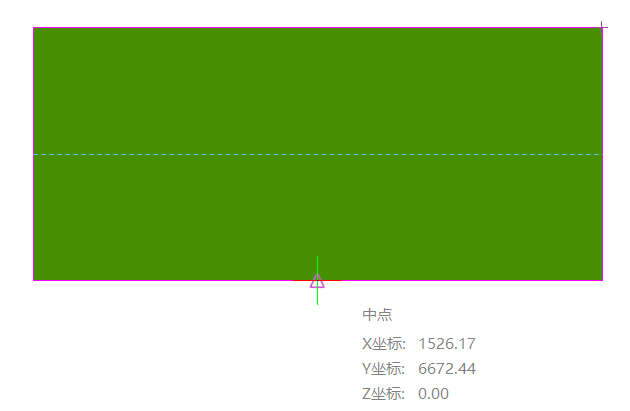
图 1-3-18 对象捕捉标记
1.3.3.3临时对象捕捉
在捕捉过程中,当需要捕捉特定类型时,按住Shift键并点击鼠标右键,会出现捕捉菜单,如图1-3-9,从菜单中选择需要的捕捉项,则本次捕捉只捕捉所选类型的点。本次捕捉为临时强制捕捉特定类型对象,捕捉结束后自动结束强制捕捉命令。这个方式可用于捕捉点分布比较集中时,更方便捕捉到需要的点。
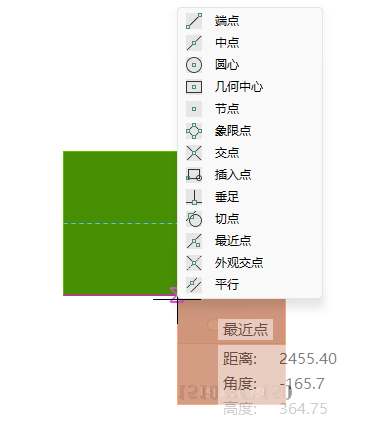
图1-3-19 临时对象捕捉
1.3.3.4对象捕捉追踪
在对象捕捉设置页面中,还可控制是否开启对象捕捉追踪。当勾选后,将鼠标悬停于对象捕捉点上,待出现追踪标记(洋红色标记)后,可出现追踪线(如图1-3-中蓝色的虚线),方便点取捕捉追踪线上的点。对象捕捉追踪设置,详“极轴追踪”页面的介绍。
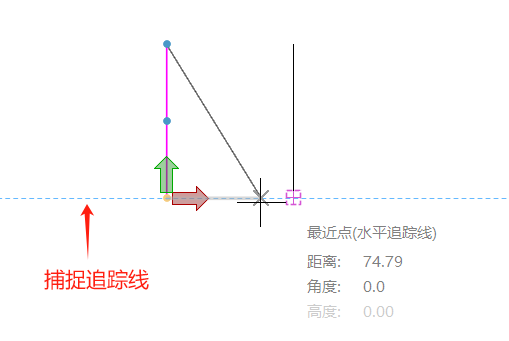
图1-3-20 对象捕捉追踪
1.3.3.5极轴捕捉与追踪
状态栏中开启极轴追踪时,可在鼠标点取处引出极轴追踪线。点击设置按钮进入极轴追踪的设置页面,如图1-3-。状态栏的极轴追踪按钮与设置页面的“启用极轴追踪”选项的勾选状态是联动的。在页面中,可设置极轴增量角和附加角。设置极轴增量角后,会以当前用户坐标系(UCS)的X轴正方向为基线,每隔一个增量角显示追踪线。设置附加角后,会以当前用户坐标系(UCS)的X轴正方向为基线,在该附加角的方向产生追踪线,这个附加角为绝对角度,如图 1-3-4。
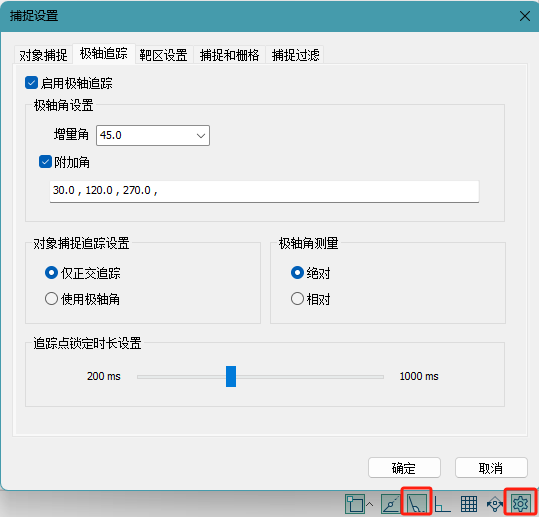
图1-3-21 极轴捕捉与追踪对话框
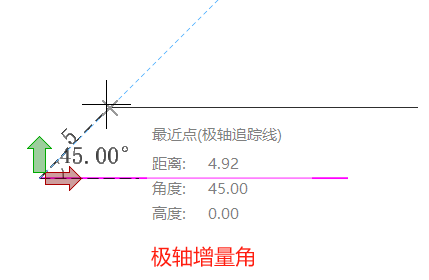
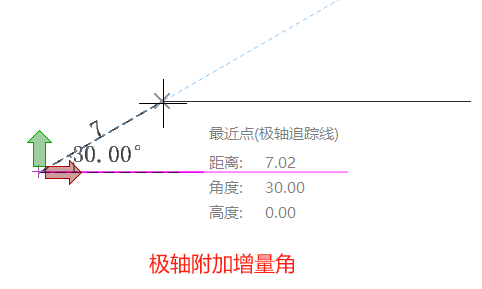
图 1-3-42 极轴追踪
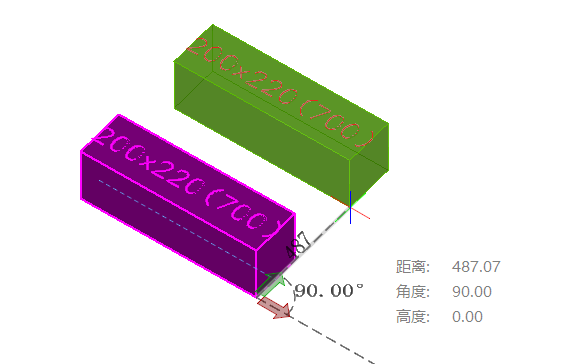
在该页面中,可控制极轴捕捉追踪按正交还是极轴。勾选正交会按当前选择点,去捕捉追踪X,Y轴;勾选极轴角追踪,会以当前选择点去捕捉追踪设置的极轴角度方向。方便按需求勾选捕捉追踪,如图 1。还可以控制极轴角追踪的角度,是按X,Y轴正交来计算追踪角度,还是按选择的当前构件相对极轴角度来计算追踪角度,如图1-3-24。
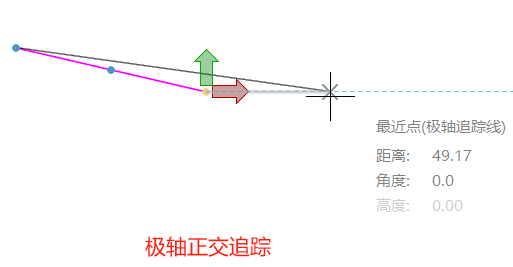
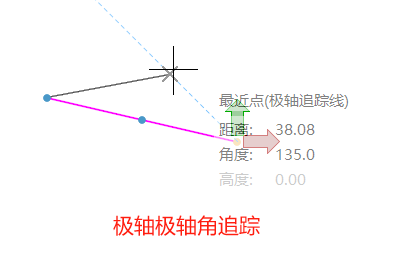
图 1-3-23 捕捉追踪
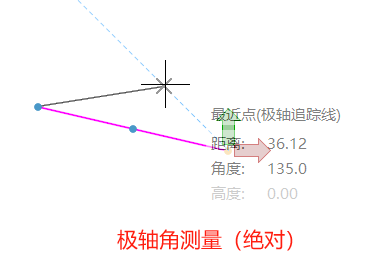
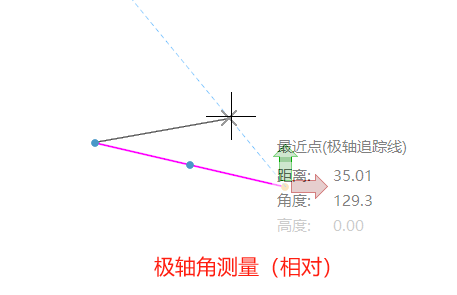
图 1-3-24 极轴角捕捉
1.3.3.6正交模式
可点击正交按钮开启,也可以用快捷键F8来开关功能,功能开启后,会锁定水平X、Y轴方向,我们移动、复制构件锁定在轴朝向上操作,如图1-3-25。
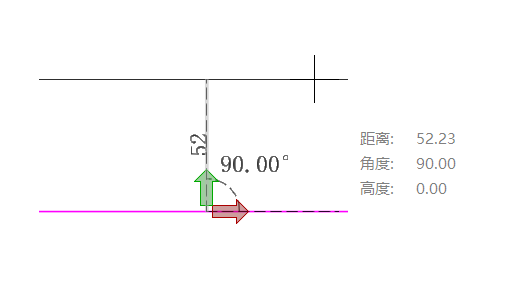

图 1-3-25 正交模式
1.3.3.7捕捉与栅格捕捉
状态栏开启栅格捕捉时,可控制鼠标箭头按固定步长移动,步长为X、Y两个方向。点击设置按钮,可打开捕捉与栅格的页面,如图1-3-。状态栏的栅格捕捉按钮与页面中的启用栅格捕捉选项联动。勾选启用栅格捕捉时,可分别设置X、Y方向的间距,间距必须为正实数,也可通过复选框勾选“X轴间距与Y轴间距相等”。例如,设置了X和Y轴的间距均为1000,则绘制时,鼠标拾取点就会按两个方向为1000的倍数进行移动,如图1-3-27。
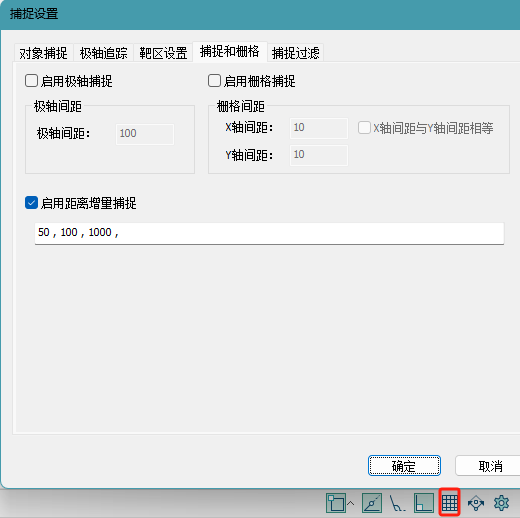
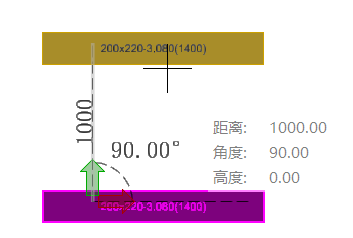
图1-3-26 捕捉与栅格对话 图1-3-27 栅格捕捉
勾选极轴捕捉时,鼠标可按极轴追踪线上的步长倍数移动。极轴捕捉和栅格捕捉为互斥选项。例如,设置极轴间距为1000,则绘制时,鼠标拾取点就会按极轴方向为1000的倍数进行移动,如图1-3-5。
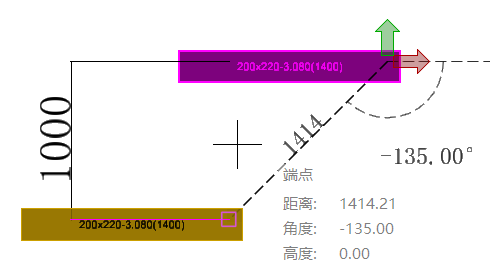
图1-3-5 极轴捕捉
1.3.3.8锁定平面
可点击锁定平面按钮开启,也可以用快捷键F6来开关功能,功能开启后,会锁定构件的高度,我们移动、复制构件固定在现有高度的水平面操作,无法在竖向Z轴方向操作,如图1-3-29。

1.3.3.9靶区设置
在捕捉设置对话框中,切换到靶区设置页面,可设置捕捉标记、靶框和十字光标的大小。通过拖动调节按钮,向右为增大,向左为减小,可将对应标记调整为合适的大小。勾选上磁吸,可使捕捉点进入靶框范围时自动将鼠标吸附到捕捉点上,如图1-3-30。
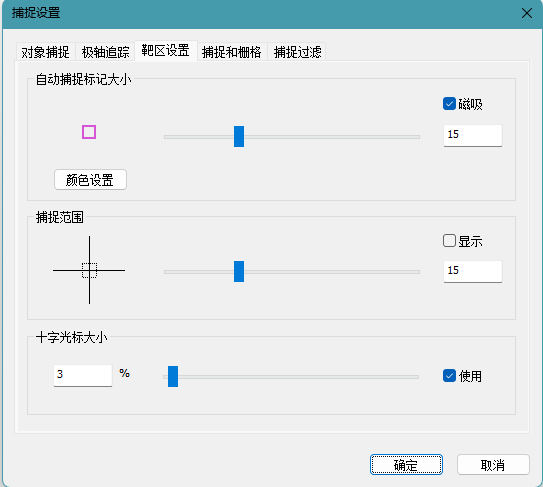
图1-3-30 靶区设置
1.3.3.10坐标系锁定与切换
(Z)智能锁轴:
当在拖动角点移动,使用命令移动的时候;会出现局部坐标,此时按下Z键,会锁定到鼠标靠近的轴,只能在当前轴进行移动;可以输入距离,固定距离进行移动。再次按下Z键可取消锁定状态;并且可以通过快捷键Shift+Z锁定Z轴,Shift+Y锁定Y轴,Shift+X来锁定X轴,锁定之后只能沿当前轴移动,可以直接输入距离进行移动,如图1-3-31。
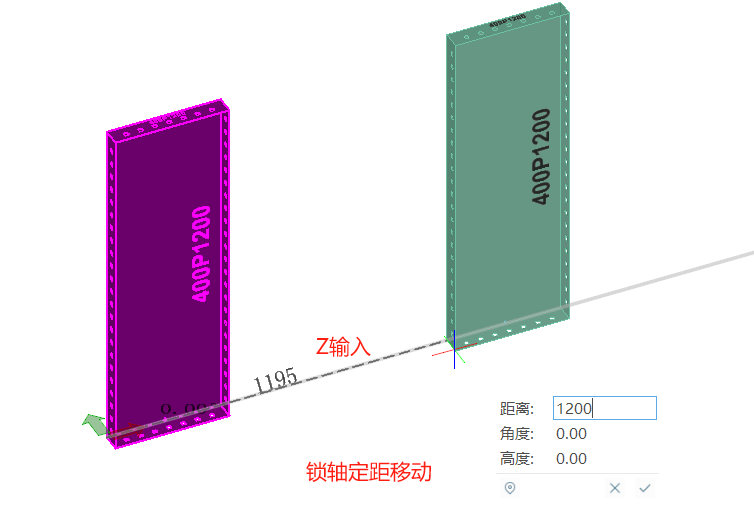
图1-3-31 锁轴移动
(R)基于当前WCS(世界坐标),切换临时坐标系:
当在拖动角点移动,使用命令移动、复制等命令时;移动点位置会出现局部坐标,此时按下R键,会根据当前世界坐标,切换到临时坐标系,再锁轴移动,就是按的当前临时坐标系来定位移动的。且由临时坐标系可以切换为世界坐标系,输入R会在各临时坐标系之间切换,如图1-3-32。
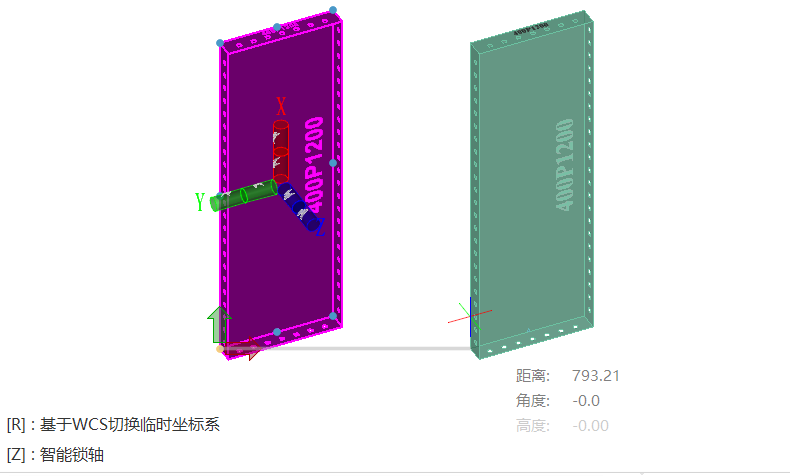
图1-3-32 坐标系切换
展开
- 第1章 系统概述
- 第2章 图纸深化的要求
- 第3章 实际配模流程示例
- 第4章 结构模型
- 第5章 自动配模
- 第6章 手动配模
- 6.1 手动配模
- 6.1.1 内转角C槽
- 6.1.2 普通C槽
- 6.1.3 内墙柱C槽
- 6.1.4 顶板
- 6.1.5 中间龙骨
- 6.1.6 边龙骨
- 6.1.7 梁侧
- 6.1.8 梁底
- 6.1.9 墙侧
- 6.1.10 K板
- 6.1.11 角铝
- 6.1.12 底角铝
- 6.1.13 7字角铝
- 6.1.14 支撑
- 6.1.15 封板
- 6.1.16 角钢
- 6.1.17 背楞
- 6.1.18 立杆
- 6.1.19 斜撑
- 6.1.20 面板孔
- 6.1.21 边框孔
- 6.1.22 楼梯配模
- 6.1.23 转角C槽
- 6.1.24 转角板
- 6.1.25 异形板
- 6.1.26 转角支撑
- 6.1.27 截面倒角板
- 6.1.28 L型倒角板
- 6.1.29 内弧板
- 6.1.30 外弧板
- 6.1.31 弧形板识别
- 6.2 模板调整
- 6.3 模板查看
- 6.4 模板检查
- 6.5 模板审核
- 6.6 拉片配模
- 6.1 手动配模
- 第7章 图纸清单
- 第8章 可视安装
- 第9章 标准库管理
- 第10章 协同设计
- 第11章 自定义模板
- 第12章 绘图工具
- 第13章 基础建模
- 第14章 帮助
- 第15章 附录
暂无相关搜索结果!